





ダビンチXiサージカルシステム (da Vinci Xi Surgical System)
半田病院にダビンチXiサージカルシステム (da Vinci Xi Surgical System)
が導入されました。
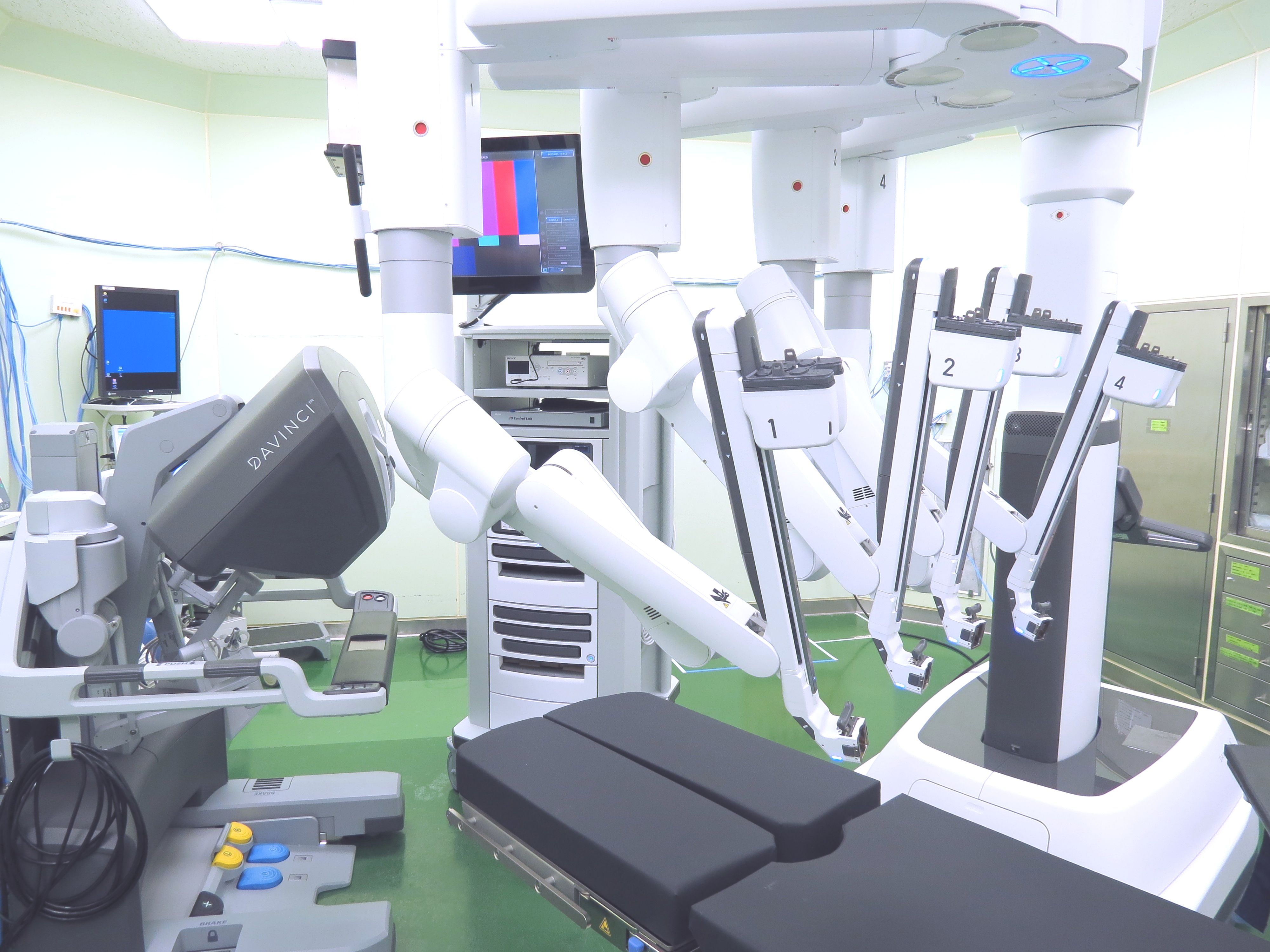
今回、半田病院に内視鏡下手術支援ロボット、ダビンチXiサージカルシステム (da Vinci Xi Surgical System)が導入されました。
ロボット手術といっても、機械が自動的に手術を行うわけではなく、ダビンチは従来の腹腔鏡手術と同じようにお腹にあけた小さな穴に精密な手術器具を取り付けたロボットアームと内視鏡を挿入し手術を行います。
医師が「サージョンコンソール」と呼ばれる操縦席に座り、高倍率 3D HD画像を見ながら手元のコントローラーを操作することで「ペイシェントカート」の4本のロボットアームにその動きが伝わります。
先端に取り付けられた手術器具は人の手よりも大きな可動域があり、手ぶれ補正機能を備えているため、狭い空間でより細かく精密な動きができます。また、高倍率 3D HD画像は、人間の目で見るよりも拡大された視野を立体的な3D画像で見ることで、奥行きを感じて操作することが可能となります。そのため、ダビンチXiサージカルシステムはより低侵襲で確実な手術を行うことができます。
ロボット手術といっても、機械が自動的に手術を行うわけではなく、ダビンチは従来の腹腔鏡手術と同じようにお腹にあけた小さな穴に精密な手術器具を取り付けたロボットアームと内視鏡を挿入し手術を行います。
医師が「サージョンコンソール」と呼ばれる操縦席に座り、高倍率 3D HD画像を見ながら手元のコントローラーを操作することで「ペイシェントカート」の4本のロボットアームにその動きが伝わります。
先端に取り付けられた手術器具は人の手よりも大きな可動域があり、手ぶれ補正機能を備えているため、狭い空間でより細かく精密な動きができます。また、高倍率 3D HD画像は、人間の目で見るよりも拡大された視野を立体的な3D画像で見ることで、奥行きを感じて操作することが可能となります。そのため、ダビンチXiサージカルシステムはより低侵襲で確実な手術を行うことができます。
da Vinci Xi Surgical System
担当医師から一言
古川 亨医師

泌尿器科では9月から知多半島では初めての前立腺癌がんに対する手術支援ロボット・ダビンチXiによる手術を開始しました。
ロボット支援下の腹腔鏡手術(以下ロボット手術と略す)では従来の腹腔鏡手術と比較して、骨盤内などの奥深い箇所の視野が良好なことと、臓器を針糸でつなぎ合わせたりする操作が格段にやりやすくなります。
前立腺がんの手術では、骨盤の深くて狭いところにある前立腺を摘出した後で、膀胱と尿道を針と糸でつなぎ合わせます。まず摘出するときには、解像度が良く、3D拡大像ですので、細かい血管や神経が良く見え、出血を少なく出来ます。また手術者以外のスタッフにも同じように見えますので、若手の教育という点でも優れています。前立腺を摘出した後に、膀胱と尿道を縫い合わせるのですが、この時も手術者の手の動きの通りに手術用鉗子を動かせるので、容易となり、確実に縫い合わせることが出来ます。
このようにロボット手術には優れた点が多く、合併症の少ない安全で低侵襲な手術が可能になります。
欠点としては触覚がないため、知らない間に臓器や血管を強い力で圧迫したり、牽引したりするための臓器損傷があるなど、ロボット手術に特有な合併症がありますので、特に注意が必要です。また機器や消耗品の価格などが高価であります。
ロボット支援手術は2000年7月にアメリカ食品医薬品局(FDA)より承認され、日本では2012年4月に前立腺がんの全摘出手術が初めて保険収載されました。
2016年までに米国2,501台、欧州644台、アジア476台、全世界で3,803台が導入されました。愛知県では2020年6月現在で20施設にこのシステムが導入されており、前立腺全摘手術の90%以上の症例が、ロボット手術で行われています。前立腺がん以外では小さな腎臓がんの部分だけを部分切除する手術や膀胱を摘出する手術などでもロボット手術が行われています。
今までは、ロボット手術を希望される方には遠方の病院を紹介していましたが、今後は地元の当院での手術が可能になります。まずは前立腺がんに対する手術から始め、腎がんに対する腎部分切除術や膀胱がんに対する膀胱全摘術などに適応を広げていく予定ですのでよろしくお願いします。
ロボット支援下の腹腔鏡手術(以下ロボット手術と略す)では従来の腹腔鏡手術と比較して、骨盤内などの奥深い箇所の視野が良好なことと、臓器を針糸でつなぎ合わせたりする操作が格段にやりやすくなります。
前立腺がんの手術では、骨盤の深くて狭いところにある前立腺を摘出した後で、膀胱と尿道を針と糸でつなぎ合わせます。まず摘出するときには、解像度が良く、3D拡大像ですので、細かい血管や神経が良く見え、出血を少なく出来ます。また手術者以外のスタッフにも同じように見えますので、若手の教育という点でも優れています。前立腺を摘出した後に、膀胱と尿道を縫い合わせるのですが、この時も手術者の手の動きの通りに手術用鉗子を動かせるので、容易となり、確実に縫い合わせることが出来ます。
このようにロボット手術には優れた点が多く、合併症の少ない安全で低侵襲な手術が可能になります。
欠点としては触覚がないため、知らない間に臓器や血管を強い力で圧迫したり、牽引したりするための臓器損傷があるなど、ロボット手術に特有な合併症がありますので、特に注意が必要です。また機器や消耗品の価格などが高価であります。
ロボット支援手術は2000年7月にアメリカ食品医薬品局(FDA)より承認され、日本では2012年4月に前立腺がんの全摘出手術が初めて保険収載されました。
2016年までに米国2,501台、欧州644台、アジア476台、全世界で3,803台が導入されました。愛知県では2020年6月現在で20施設にこのシステムが導入されており、前立腺全摘手術の90%以上の症例が、ロボット手術で行われています。前立腺がん以外では小さな腎臓がんの部分だけを部分切除する手術や膀胱を摘出する手術などでもロボット手術が行われています。
今までは、ロボット手術を希望される方には遠方の病院を紹介していましたが、今後は地元の当院での手術が可能になります。まずは前立腺がんに対する手術から始め、腎がんに対する腎部分切除術や膀胱がんに対する膀胱全摘術などに適応を広げていく予定ですのでよろしくお願いします。
浅井 健太郎医師

半田病院に手術支援ロボットが導入されました。他院の見学やロボットの操作をしてみて私が思ったことを少しお伝えしたいと思います。
正直なところロボットはなくても比較的安定した手術はできており、導入にあたってのメリットは、傷口が多少小さくなるか、出血が多少減るかくらいであまりないように考えていました。
いままでの内視鏡手術というのは、操作する鉗子を人間の手や腕にたとえると、ピースサインをつくりその指を閉じたり開いたりして操作をするのですが、手首の関節をギプスで固定されたような操作しかできませんでした。ロボットアームはこのギプスが外れ、自由度が格段に上がりました。内視鏡による近接した部位への繊細な操作と、人の手による自由な操作の双方を兼ね備えた手術ができるのではないかと思います。
ロボットは教育面でも非常にメリットがあることを感じました。一つ目は手術操作が術者以外にも良く見えることです。うまい術者の手術を見て学習することや、逆に見てもらい指導を受けることも容易です。二つ目はシミュレータがついており、これが秀逸であることです。3Dであたかも実際に鉗子を動かしているかのようにアームの操作をすることができます。操作の採点もあり、自分の弱点、改善点を指摘してくれます。
以上を踏まえロボットの未来を考えてみました。人間の操作、視覚、手術対象に入り込む(悪く言えば割り込む)ことで、人間がする手術というものをデータ化できます。AIによる深層学習が進めば、ロボット自身の判断でアームを動かして手術をすることが出来るでしょうし、すでに研究も行われていることでしょう。
車の自動運転の様に、まずは、カメラ操作の自動化、次には人間の危険操作に対する警告や回避処置、さらには適切な部位への鉗子の自動移動などが行われ、最終的には人間の監視下でのロボット自身による手術もありうる話かなと考えたりしています。
ロボットに仕事を奪われると考えるか、あるいは複雑化、多様化した医療をお手伝いしてくれるパートナーと考えるか。私としては、いろいろわがままを聞いてくれるドラえもんのようなロボットに育ってほしいと思います。
正直なところロボットはなくても比較的安定した手術はできており、導入にあたってのメリットは、傷口が多少小さくなるか、出血が多少減るかくらいであまりないように考えていました。
いままでの内視鏡手術というのは、操作する鉗子を人間の手や腕にたとえると、ピースサインをつくりその指を閉じたり開いたりして操作をするのですが、手首の関節をギプスで固定されたような操作しかできませんでした。ロボットアームはこのギプスが外れ、自由度が格段に上がりました。内視鏡による近接した部位への繊細な操作と、人の手による自由な操作の双方を兼ね備えた手術ができるのではないかと思います。
ロボットは教育面でも非常にメリットがあることを感じました。一つ目は手術操作が術者以外にも良く見えることです。うまい術者の手術を見て学習することや、逆に見てもらい指導を受けることも容易です。二つ目はシミュレータがついており、これが秀逸であることです。3Dであたかも実際に鉗子を動かしているかのようにアームの操作をすることができます。操作の採点もあり、自分の弱点、改善点を指摘してくれます。
以上を踏まえロボットの未来を考えてみました。人間の操作、視覚、手術対象に入り込む(悪く言えば割り込む)ことで、人間がする手術というものをデータ化できます。AIによる深層学習が進めば、ロボット自身の判断でアームを動かして手術をすることが出来るでしょうし、すでに研究も行われていることでしょう。
車の自動運転の様に、まずは、カメラ操作の自動化、次には人間の危険操作に対する警告や回避処置、さらには適切な部位への鉗子の自動移動などが行われ、最終的には人間の監視下でのロボット自身による手術もありうる話かなと考えたりしています。
ロボットに仕事を奪われると考えるか、あるいは複雑化、多様化した医療をお手伝いしてくれるパートナーと考えるか。私としては、いろいろわがままを聞いてくれるドラえもんのようなロボットに育ってほしいと思います。